Robotic Hand (Print in Place Toy)
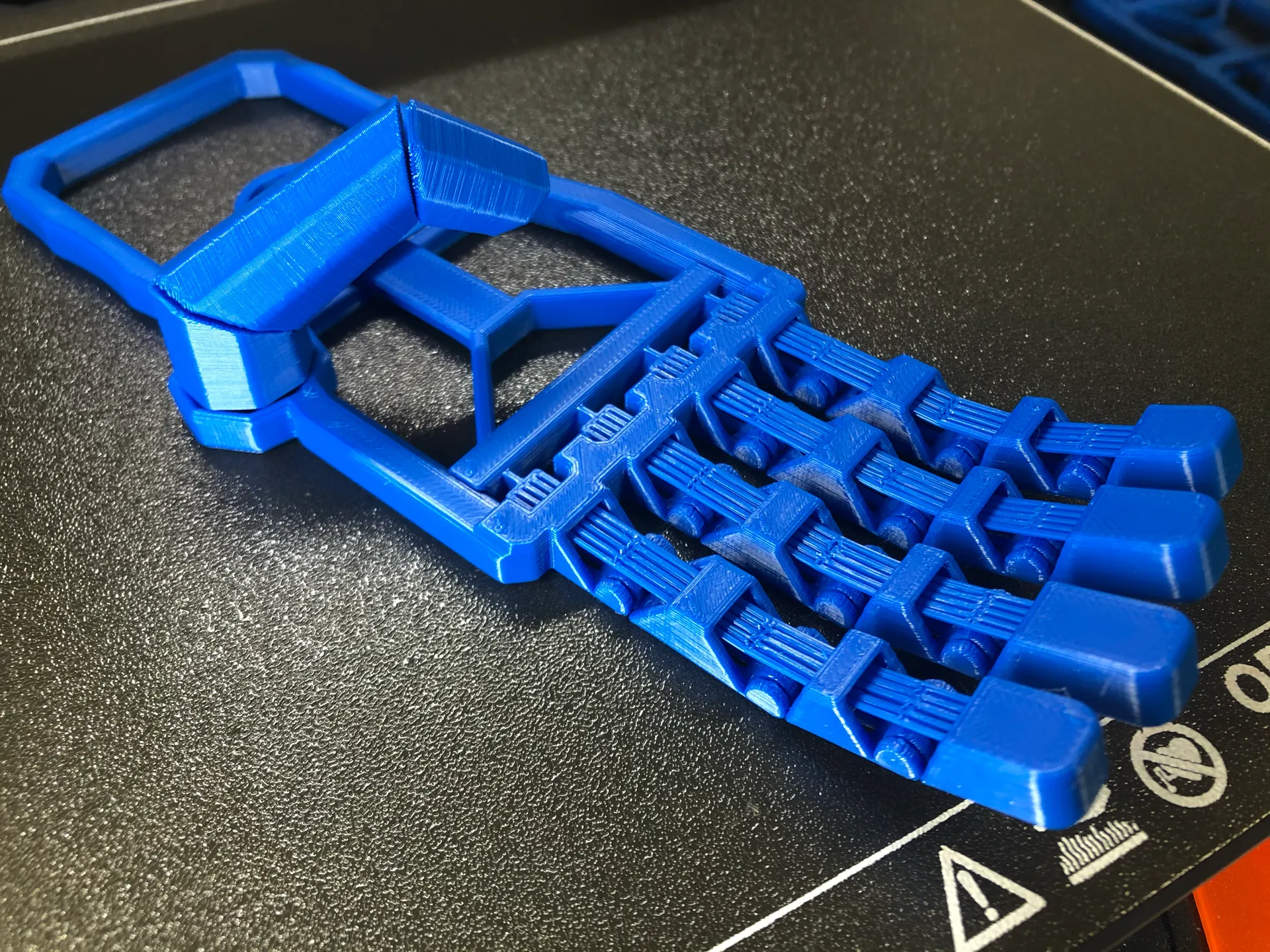





Print in Place - Print & Play
Is a Mechanic Hand but it moves like a real hand.
618
2639
20
13 k
updated February 21, 2020
Description
PDFPrint in Place - Print & Play
Is a Mechanic Hand but it moves like a real hand.
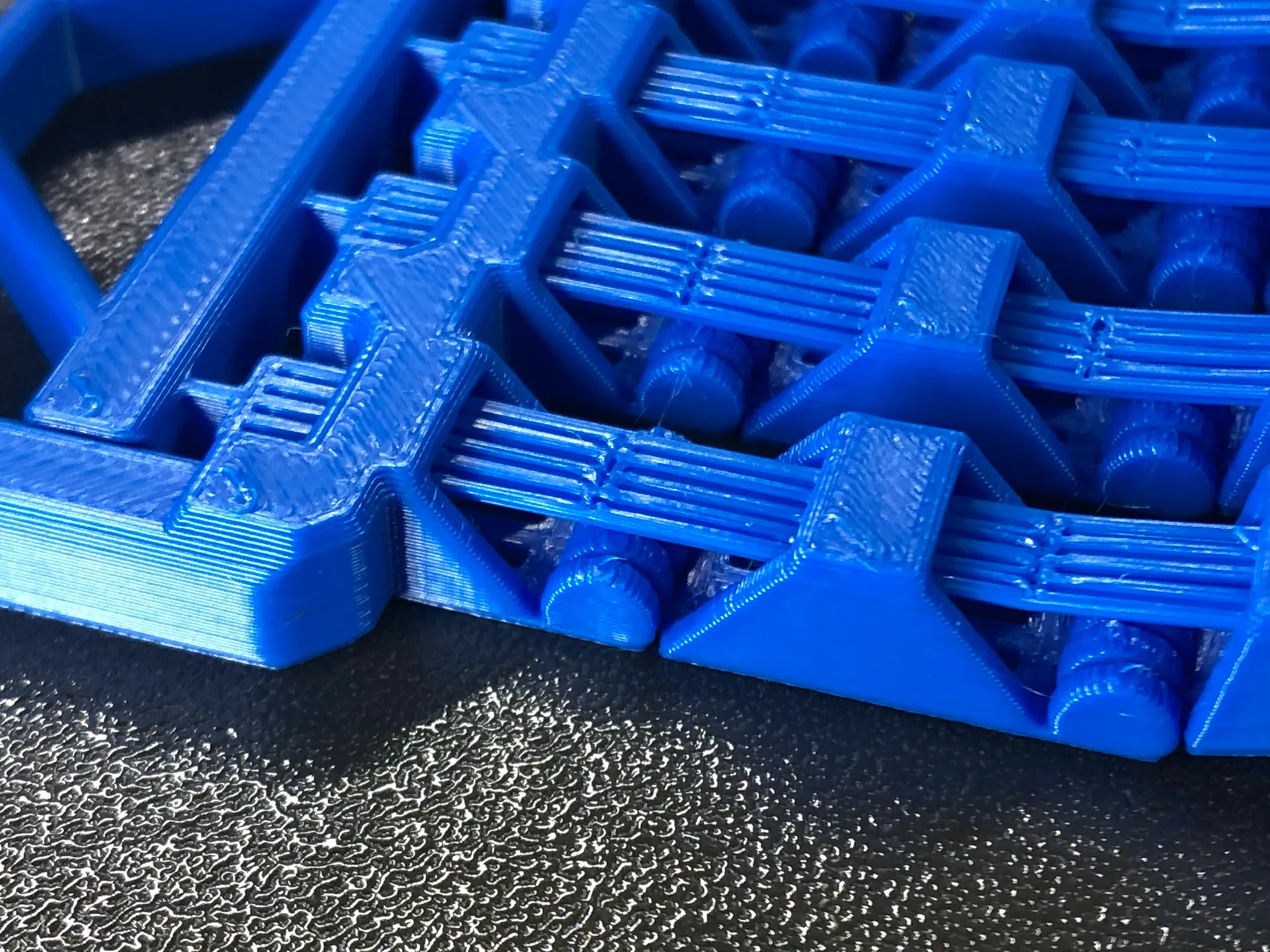
R2- This is a review of my previous design. I Changed the the finger joints (add hinges) and other smaller improvements.
R3- Created limits so each finger joints don't fold all the way. Also, redesign the string that connect palm to tip of fingers.
R4- Tendons are a separate model - https://www.prusaprinters.org/prints/145404-robotic-hand-toy-remix
Tags
Model origin
The author remixed this model.