Angled Adaptor for Virpil/Thrustmaster Joystick
























Angled Adaptor for Virpil/Thrustmaster Joystick
20
56
0
1435
updated March 14, 2022
Description
PDFPress Like for encouragement. Comment for improvement.
Virpil released its own version. Check it out!
I modified a Virpil WarBRD joystick so it is more ergonomic, looks cool and can be used as a joystick and throttle simultaneously.
The original idea comes from the APU mech in the Matrix Revolutions movie, The Expanse's Rocinante, Mech manga and this video.
Materials:
- optional rotary potentiometer
- optional 5-pin JST PH male connector plugged into the base.
Assembly:
- See pictures for details.
- Assemble and tighten from bottom to top.
- You can plug the potentiometer wires either:
- in an Arduino Leonardo or Pro Micro, load the joystick library and follow the examples in Arduino tutorial chapter 3.
- in the Virpil base.
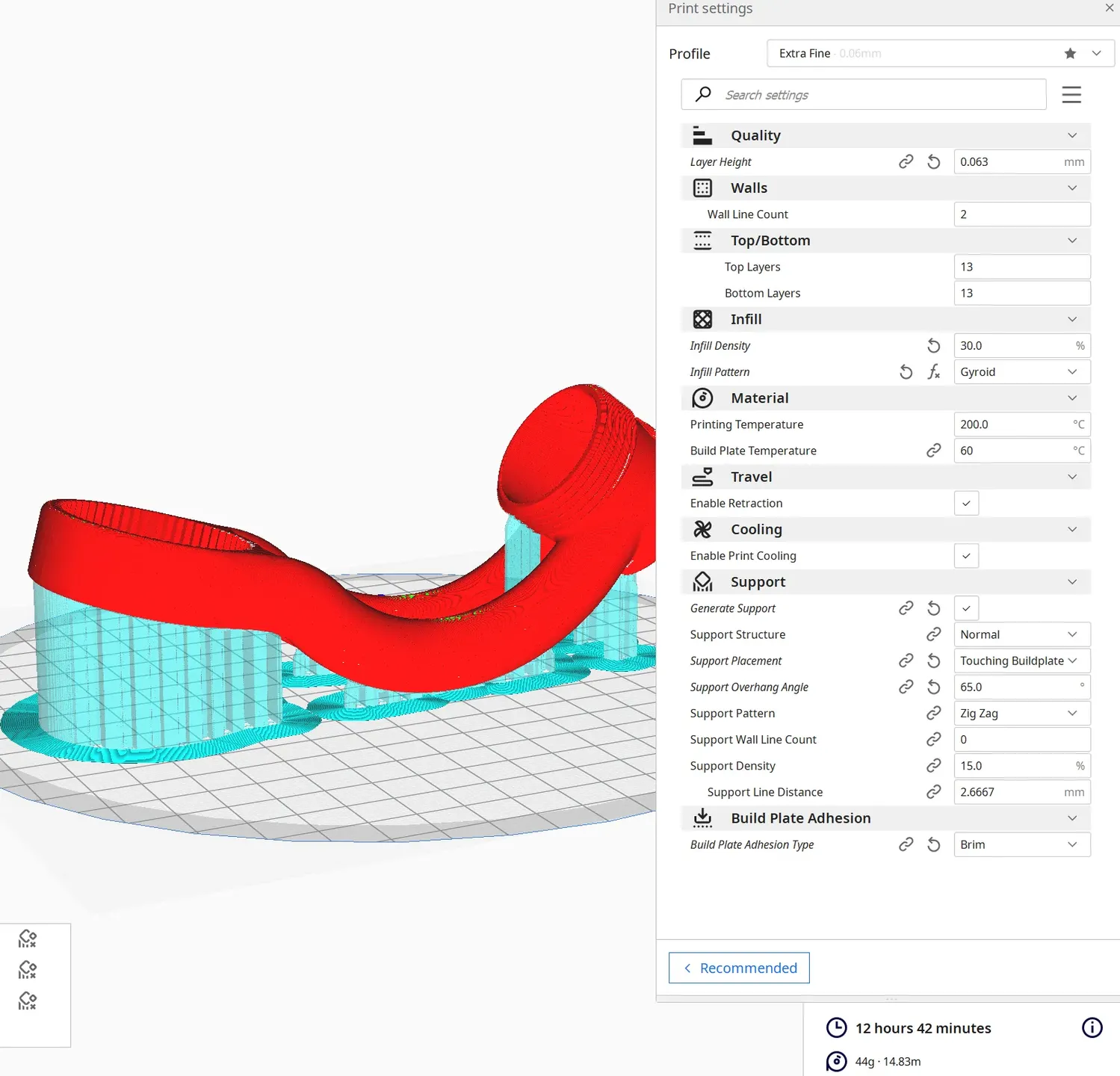
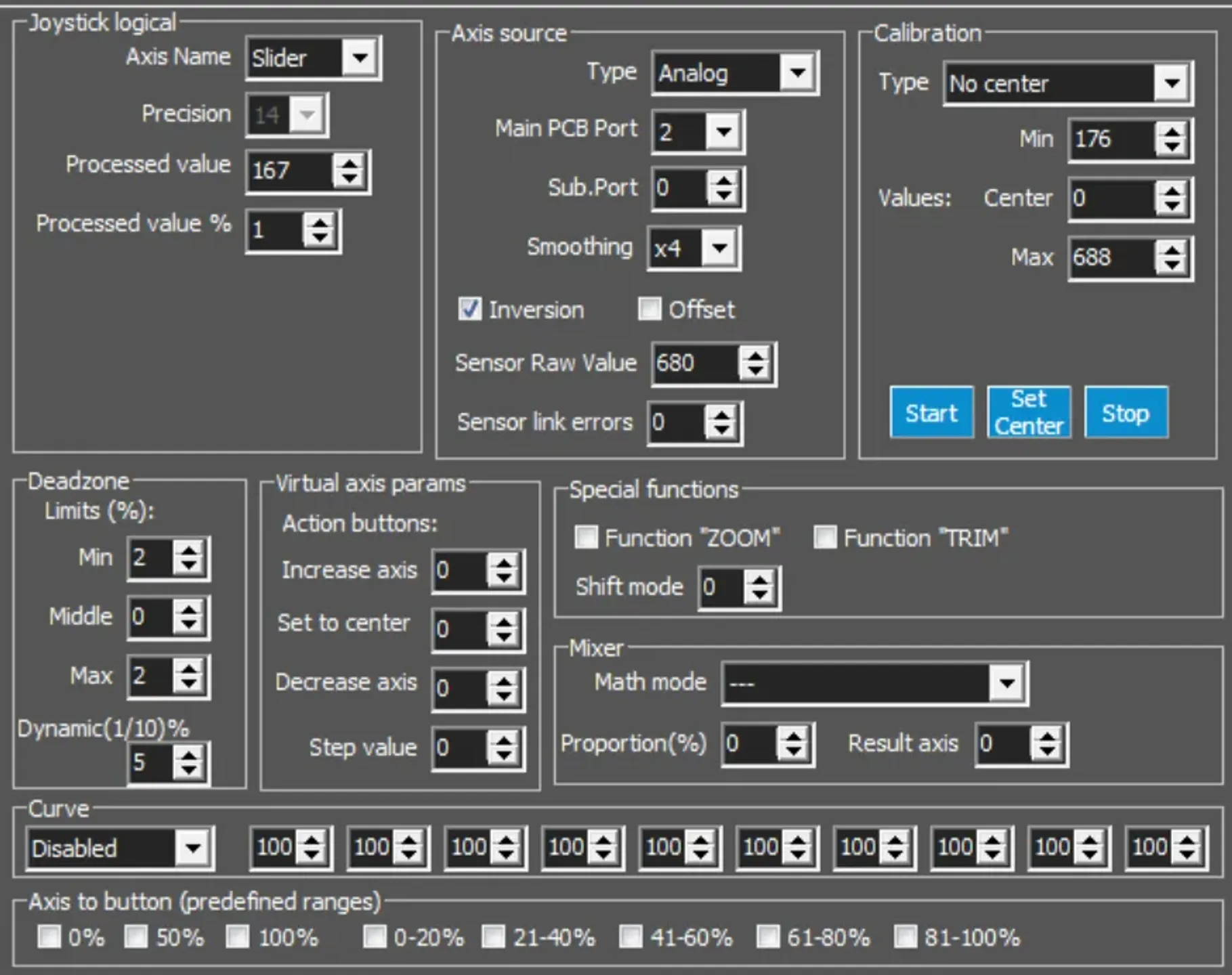
- When the wiring is done and the grip is connected, open the Virpil's configuration's tool, define 2 new axis (double click on a free axis) and calibrate them. That's it. Just take your time, it's very easy.
Known Issues and Planned improvements:
- Designed to also fit the Thrustmaster F-16 grip, but untested.
- Use this if you have issues with the balancing of the grip.
Disclaimer:
- Plastic isn't as resilient as the metal of the grip.
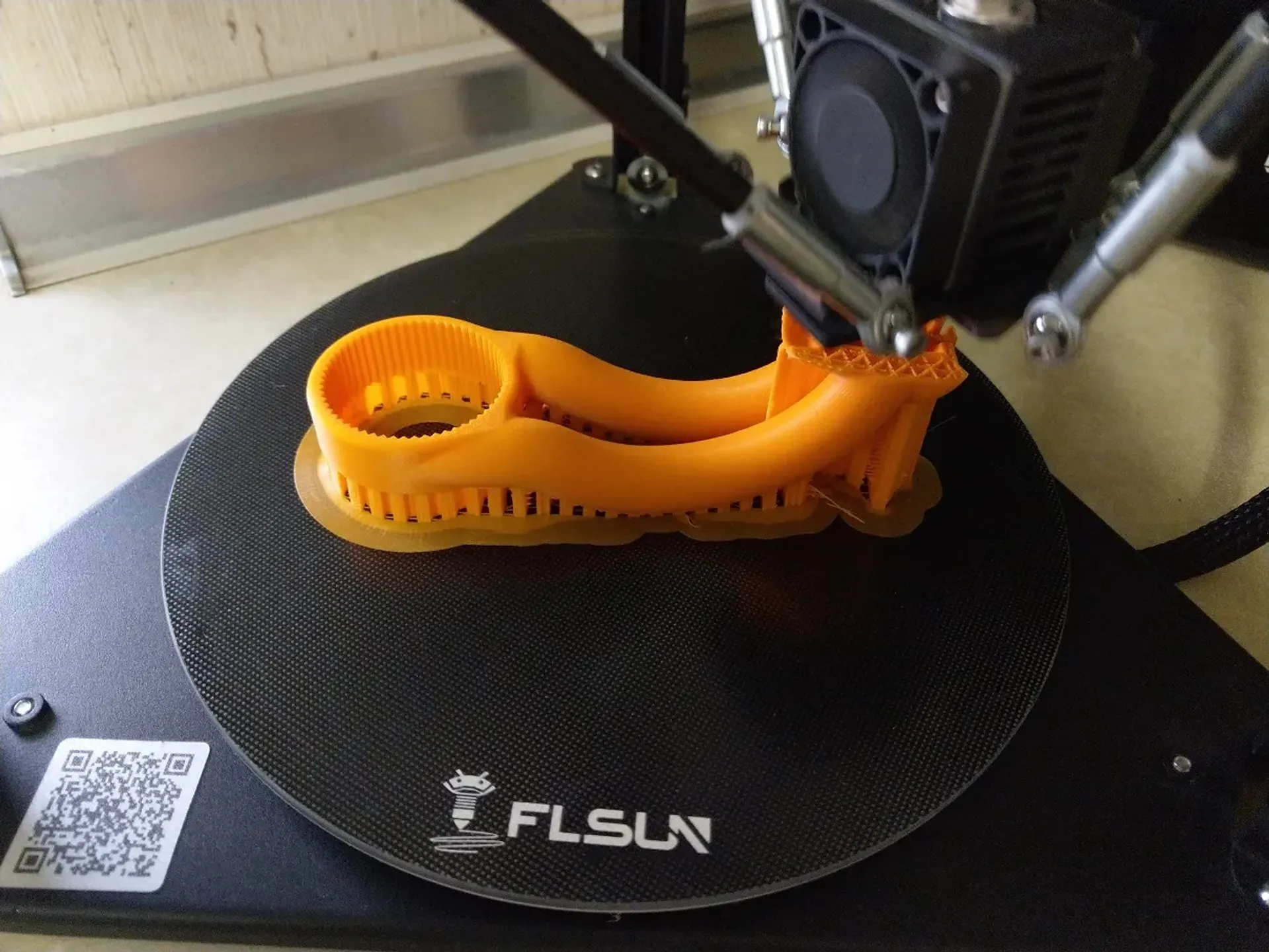
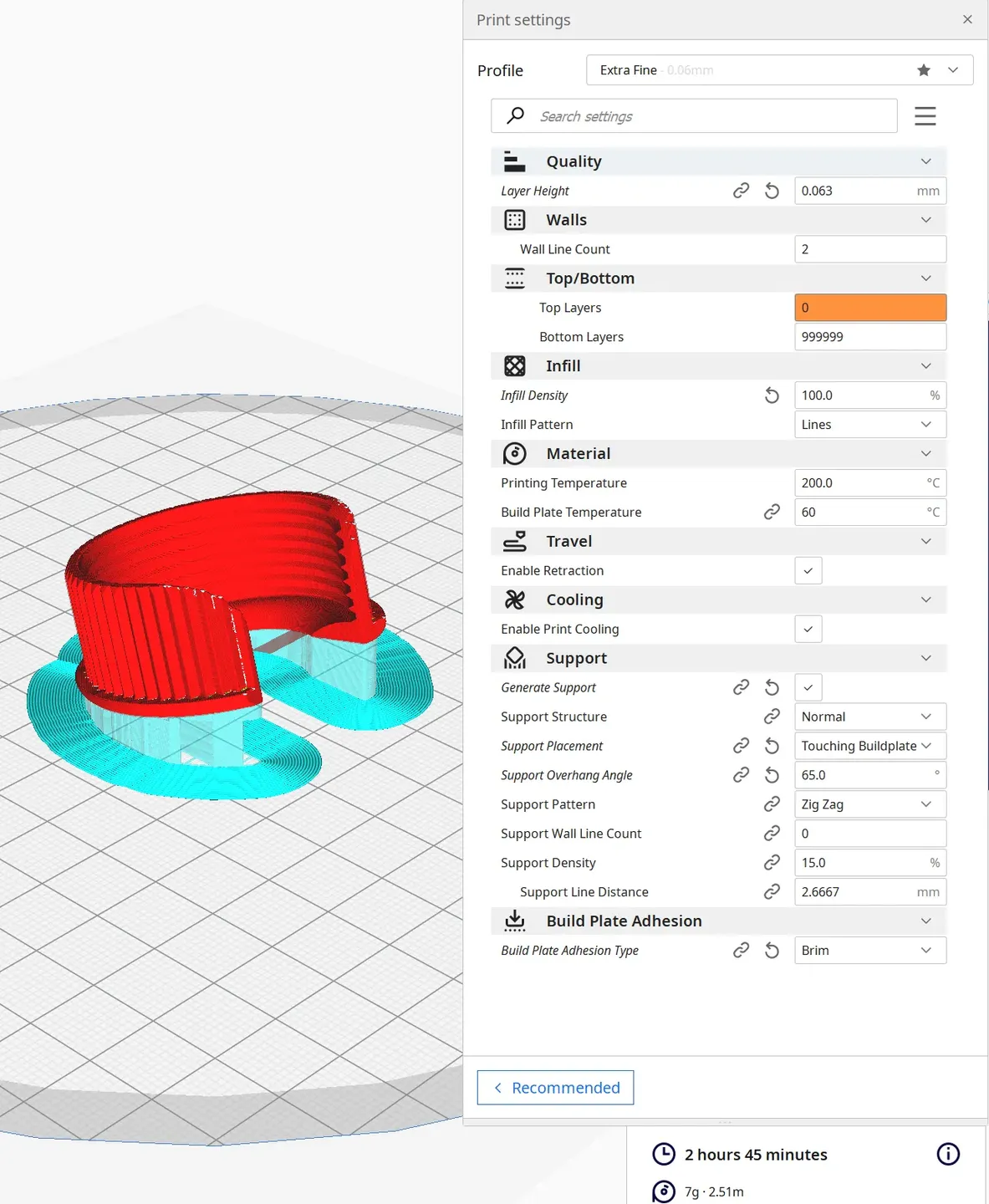
If you can make the lower lock out of metal: do. Otherwise consider resin. If it's not an option, don't be cheap on the plastic. Use PLA or stronger, go 100% infill and print with an angle (potential crack to filament layer). Adapt the joystick response curves so you don't yank your stick like a mad man. Then it'll be fine.
Tags
Model origin
The author marked this model as their own original creation. Imported from Thingiverse.