Upkie Wheeled Biped Robot






Description
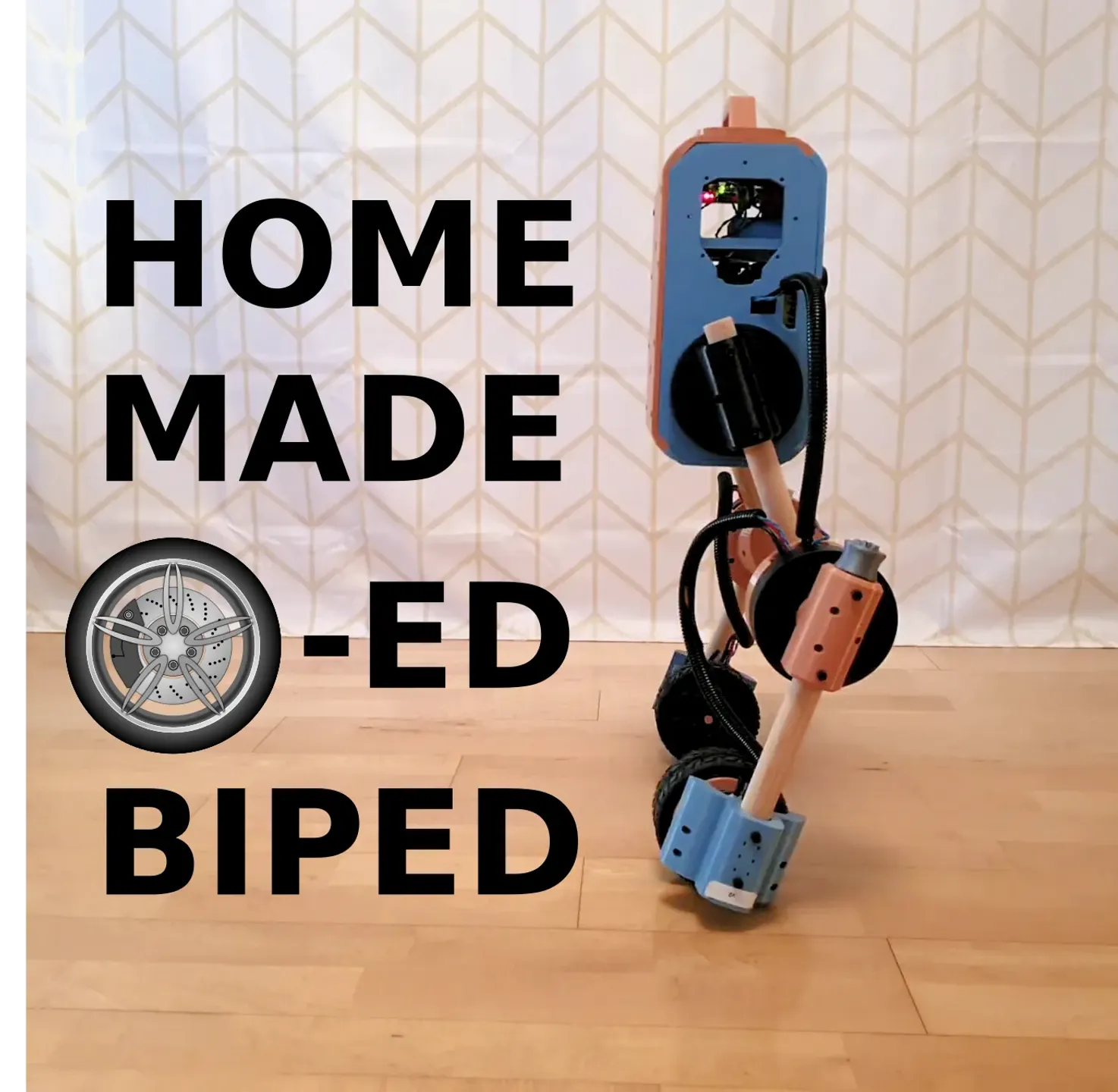
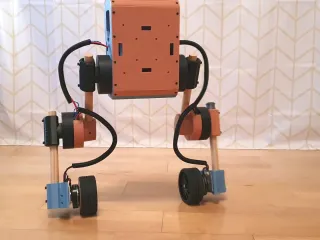
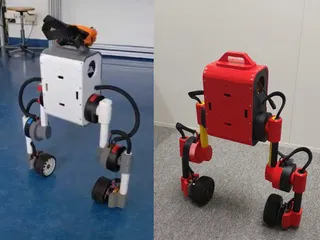
PDFUpkie is a fully open source self-balancing wheeled biped robot. It has wheels for balancing, and legs to go off-road or negotiate uneven terrains. Upkies are designed to be buildable at home with tools and components ordered online, like mjbots actuators. Motion control runs onboard the robot's Raspberry Pi.
Here it is in action:
Print instructions
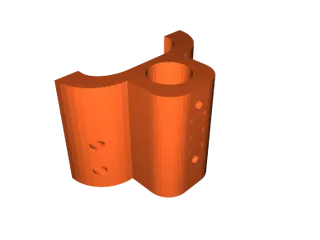
All parts are printed in PETG with a 0.2 mm layer height. Infill varies from 15% to 30%, but most of these values are guesstimates that don't come from observing parts breaking after robot falls. The only exception to this is the wheel hub, where there is an explicit infill modifier on the hex coupler connector.
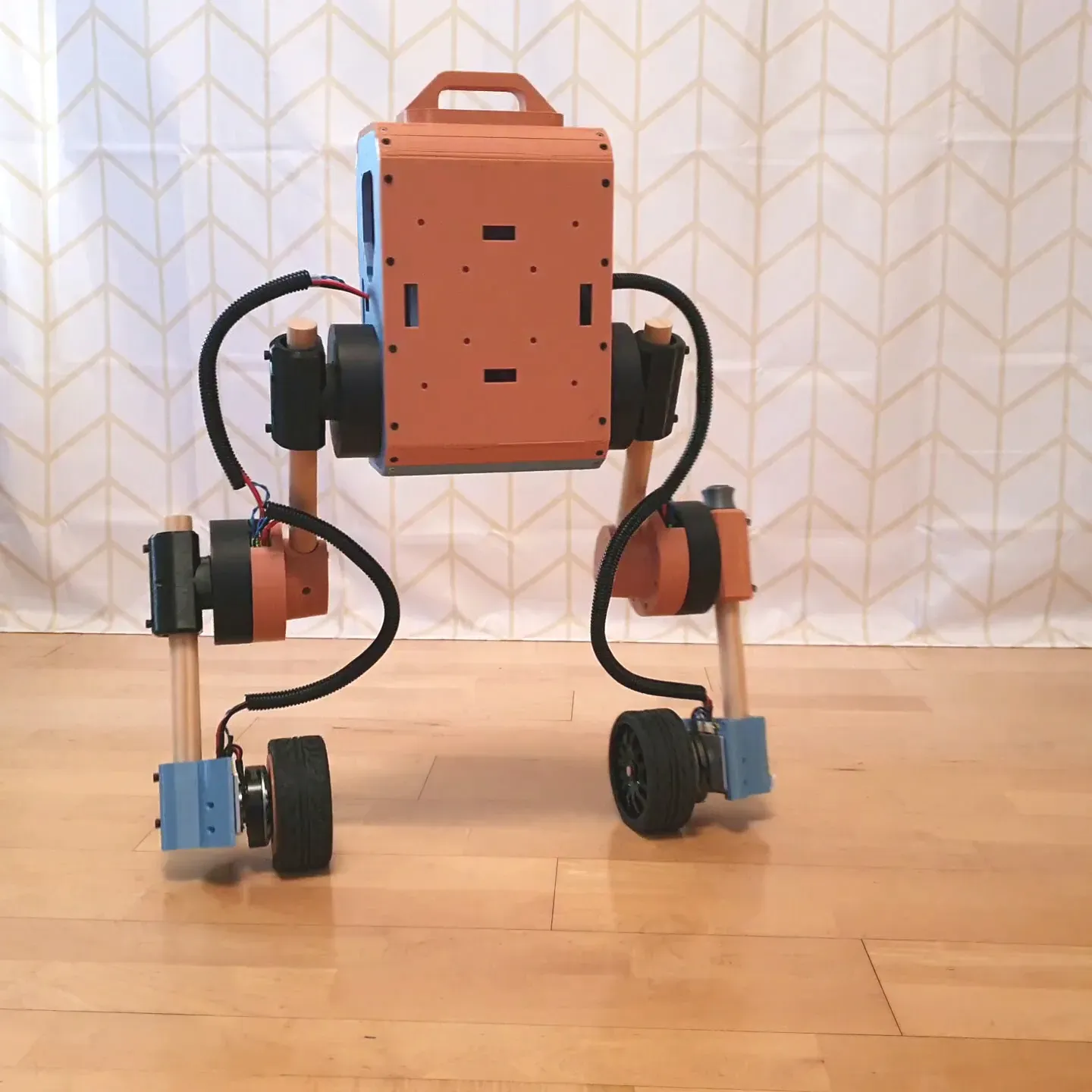
Build instructions
The build instructions explain how to print, build and setup a new robot step by step.
Open source software
Upkie's software is fully open source on GitHub. It runs on Linux or macOS, and the code can be in Python or C++. Questions are welcome in the Chat and Discussions forum.
Project log
Check out the project log Hackaday.io for latest changes and a history of the activity of the project.
Last but not least
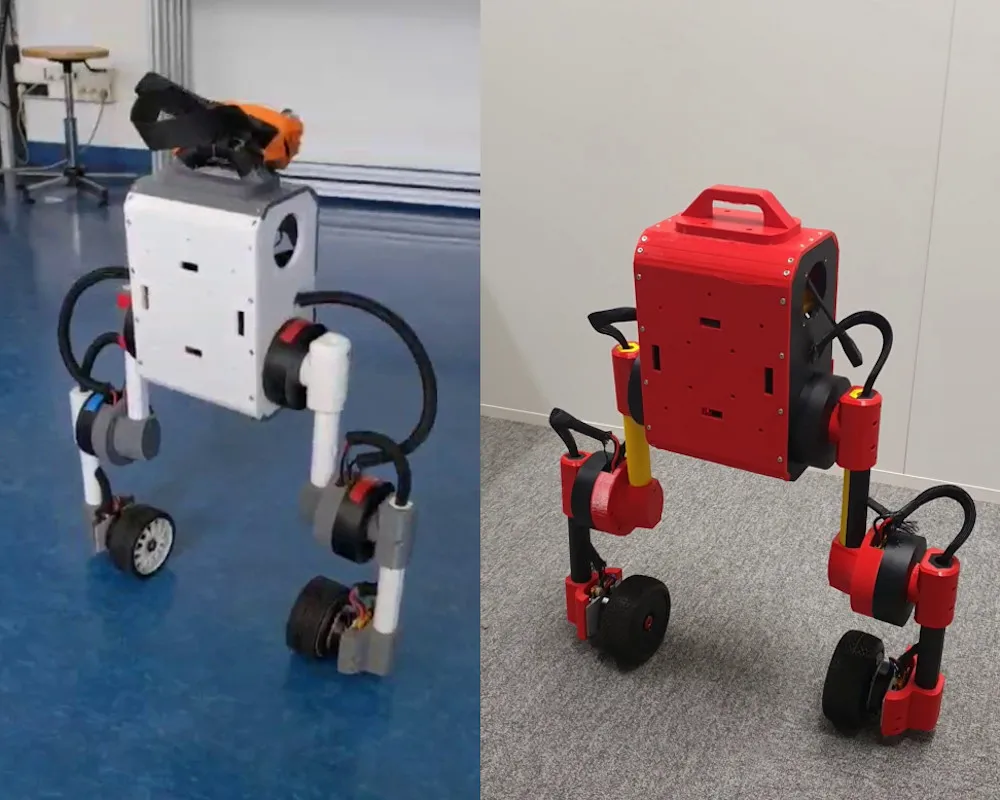
Build it, remix it, take it places :-)
License
The license below applies to the files here on Printables. Other components of the robot such as the actuators and software have their own licenses (mostly Apache 2.0). The head plate here is a remix of the pi3hat side plate from the quad A1 chassis: it adds a screw pattern for the handle, stronger support for heat-set inserts and text annotations for the pi3hat orientation.
Tags
Model origin
The author marked this model as their own original creation.